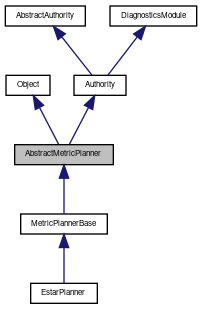
Interface for metric planners like Dijkstra and E*. More...
#include <pilot/AbstractMetricPlanner.h>
Public Types | |
| enum | Status { OUT_OF_GRID, VALID, INVALID, WAVEFRONT, OUTDATED, GOAL, OBSTACLE } |
| Planner status of a fixed position (planner map cell) More... | |
| typedef std::vector< Point2f > | Carrot |
| typedef std::function< float(int x, int y, float r)> | CostFn |
| Type declaration for a cost function to be used with setGoal(const Polygon2i, ...) or setGoal(const Polygon2f, ...). More... | |
| enum | Flags |
| typedef std::multimap< std::string, std::string > | ChannelNameMapping |
| typedef std::map< std::string, Status > | ChannelStatusMap |
| typedef std::map< std::string, Status > | StatusMap |
Public Member Functions | |
| AbstractMetricPlanner () | |
| virtual | ~AbstractMetricPlanner () |
| void | initialize (Authority *parent) |
| virtual Point2f | getGradient (const Point2f &worldPos) const =0 |
| Returns the gradient for a position in world coordinates. More... | |
| void | update (const maps::CostMap &map) |
| Update the planning context with the current costmap (entire area). More... | |
| virtual void | update (const maps::CostMap &map, const maps::DirtyRegions &dirty)=0 |
| Update the planning context with the current costmap (dirty regions only) More... | |
| virtual void | setOnewayMap (const maps::OccupancyGrid &onewayMap)=0 |
| Set a map describing oneway road restrictions. More... | |
| virtual double | infinity () const =0 |
| Returns the value that is returned by getValue() when cost values are not yet computed or are infinite. More... | |
| virtual double | getValue (const Point2f &worldPos, bool ignoreDoubleBuffer=false) const =0 |
| Returns the cost value at position (in world coordinates) in the planner map. More... | |
| virtual double | getValueFiltered (const Point2f &worldPos, bool ignoreDoubleBuffer=false) const =0 |
| Returns the interpolated cost value at position (in world coordinates) in the planner map. More... | |
| virtual Carrot | getCarrot (const Point2f &pos, int maxCount, float maxDistance=1e10f) const =0 |
| Return the optimal path to the goal, starting at pos. More... | |
| virtual Pose2 | getCurrentGoal (const Point2f &pos) const =0 |
| Return the current goal point. More... | |
| virtual Point2i | world2map (const Point2f &p) const =0 |
| Convert a given point to integer map coordinates. More... | |
| virtual Point2f | map2world (const Point2i &p) const =0 |
| Convert a given point to world coordinates. More... | |
| virtual float | getCellSize () const =0 |
| Get planner map cell size. More... | |
| virtual Rect2f | getRegion () const =0 |
| Get planner map area (world coordinates) More... | |
| virtual Rect2i | getMapRegion () const =0 |
| Get planner map area (map coordinates) More... | |
| virtual Duration | getAccumulatedPlanningTime () const =0 |
| Get accumulated planning time since goal was set. More... | |
| virtual void | setRobotPosition (const Point2f &robotPos) |
| Set the current robot position in planner (world position) Base implementation is empty. More... | |
| virtual void | setGoal (const Point2f &goal, float radius, bool clearDoubleBuffer=true, bool prepareNew=true)=0 |
| virtual void | setGoal (const Polygon2i &polygon, int radius=1, bool clearDoubleBuffer=true, bool prepareNew=true)=0 |
| Sets the interior of the polygon as goal region and additionally adds an optional goal border with the specified radius where the initial costs are set for seeding the wavefront propagation. More... | |
| virtual void | setGoal (const Polygon2f &polygon, float radius=0.1f, bool clearDoubleBuffer=true, bool prepareNew=true)=0 |
| Same as above but takes world coordinates in meter. More... | |
| virtual void | setGoal (const Polygon2i &polygon, int radius, CostFn &costFn, bool clearDoubleBuffer=true, bool prepareNew=true)=0 |
| Same as above but additionally allows to specify a cost function that is called for each cell within the polygon to compute the initial costs of that cell. More... | |
| virtual void | setGoal (const Polygon2f &polygon, float radius, CostFn &costFn, bool clearDoubleBuffer=true, bool prepareNew=true)=0 |
| Same as above but takes world coordinates in meter. More... | |
| virtual bool | hasValidGoal () const =0 |
| Check if the internal planner has a goal. More... | |
| virtual void | plan (const Point2f &pos, Duration plantime)=0 |
| High level planning interface. More... | |
| virtual bool | havePlan () const =0 |
| Returns if we have or have had a valid path to the set goal. More... | |
| virtual bool | havePlanSinceUpdate () const =0 |
| Returns if we have or have had a valid path to the set goal, after the cost map was updated. More... | |
| virtual Time | lastValidPlan () const =0 |
| Return last time a valid plan existed. More... | |
| virtual bool | haveWork () const =0 |
| Low level planning interface. More... | |
| virtual void | planTime (Duration plantime)=0 |
| Low level planning interface. More... | |
| virtual void | planSteps (int steps)=0 |
| Low level planning interface. More... | |
| virtual void | planStep ()=0 |
| Low level planning interface. More... | |
| virtual void | resetPlanningTimeout ()=0 |
| Reset initial last plan time that is used for timeout. More... | |
| virtual maps::CostMap | getNavFunction (bool ignoreDoubleBuffer=false) const =0 |
| Creates a deep copy of the navigation function that contains the accumulated costs from each cell to the goal as a potential field. More... | |
| virtual maps::GridMap< uint8, 3 > | dumpNavStatus (bool useDoubleBuffer=false, bool costsInGoalRegion=true)=0 |
| Create a color image of the navigation function (for user presentation, debugging). More... | |
| virtual maps::GridMap< uint8, 3 > | showNavFunctionNearGoal ()=0 |
| Create high-res image of navigation function in goal area (for user presentation, debugging). More... | |
| virtual Status | getStatus (const Point2f &p) const =0 |
| Return planner status at world position. More... | |
| Class const & | getClass () const |
| void | reflect (Reflector &r) |
| void | enableSubscriberCallbacks (bool enable) |
| StatusManager & | getStatusManager () |
| void | setHeartbeatInterval (const Duration &interval) |
| void | setName (const std::string &name) |
| Duration | getHeartbeatInterval () const |
| void | heartbeat () |
| bool | hasHeartbeatTimeout () const |
| void | bootup (const std::string &message, const std::string &trText="") |
| void | bootupFinished () |
| void | recoverFinished () |
| void | recover (const std::string &message, const std::string &trText="") |
| void | ok (const std::string &category="") |
| bool | warning (const std::string &category, const std::string &message, const std::string &trText="") |
| bool | error (const std::string &category, const std::string &message, const std::string &trText="") |
| bool | setStatus (Status::StatusMode mode, const std::string &category, const std::string &message, const std::string &trText="") |
| Status::StatusMode | getStatus () const |
| StatusMap | getStatusMap () const |
| StatusManager::StatusMap | getStatusMap () override |
| StatusManager::StatusMap | getStatusMap () override |
| void | checkin (const ResourceName &fullname, AuthorityRuntimePtr runtime=AuthorityRuntimePtr()) |
| void | checkin (const ResourceName &ns, const std::string &name, AuthorityRuntimePtr runtime=AuthorityRuntimePtr()) |
| void | checkin (Authority &iParent, const ResourceName &ns, const std::string &name) |
| void | checkin (Authority &iParent, const std::string &name) |
| void | checkin (const ResourceName &fullname, AuthorityRuntimePtr runtime=AuthorityRuntimePtr()) |
| void | checkin (const ResourceName &ns, const std::string &name, AuthorityRuntimePtr runtime=AuthorityRuntimePtr()) |
| void | checkin (Authority &iParent, const ResourceName &ns, const std::string &name) |
| void | checkin (Authority &iParent, const std::string &name) |
| void | checkout () |
| void | checkout () |
| bool | isValid () const |
| bool | isValid () const |
| void | validate () const |
| void | validate () const |
| void | startWithParent (bool start) |
| void | startWithParent (bool start) |
| AuthorityRuntimePtr | getRuntime () |
| AuthorityRuntimePtr | getRuntime () |
| std::set< Authority *> | getChildren () |
| std::set< Authority *> | getChildren () |
| void | addImmediateHandler (DiagnosticRunnablePtr runnable) |
| void | addImmediateHandler (DiagnosticRunnablePtr runnable) |
| void | addImmediateHandlerFunction (F &&fn) |
| void | addImmediateHandlerFunction (F &&fn) |
| void | addFinalizeHandler (DiagnosticRunnablePtr runnable) |
| void | addFinalizeHandler (DiagnosticRunnablePtr runnable) |
| void | addFinalizeHandlerFunction (F &&fn) |
| void | addFinalizeHandlerFunction (F &&fn) |
| TimerPtr | createTimer (Duration period, TimerCallback callback, bool oneshot=false) |
| TimerPtr | createTimer (Duration period, Duration tolerance, TimerCallback callback, bool oneshot=false) |
| TimerPtr | createTimer (Duration period, void(Class::*f)(const Timer &), Class *obj, bool oneshot=false) |
| TimerPtr | createTimer (Duration period, void(Class::*f)(const Timer &), bool oneshot=false) |
| TimerPtr | createTimer (Duration period, Duration tolerance, void(Class::*f)(const Timer &), Class *obj, bool oneshot=false) |
| TimerPtr | createTimer (Duration period, Duration tolerance, void(Class::*f)(const Timer &), bool oneshot=false) |
| TimerPtr | createTimer (Time time, TimerCallback callback) |
| TimerPtr | createTimer (Time time, void(Class::*f)(const Timer &), Class *obj) |
| TimerPtr | createTimer (Time time, void(Class::*f)(const Timer &)) |
| TimerPtr | createTimer (Duration period, TimerCallback callback, bool oneshot=false) |
| TimerPtr | createTimer (Duration period, Duration tolerance, TimerCallback callback, bool oneshot=false) |
| TimerPtr | createTimer (Duration period, void(Class::*f)(const Timer &), Class *obj, bool oneshot=false) |
| TimerPtr | createTimer (Duration period, void(Class::*f)(const Timer &), bool oneshot=false) |
| TimerPtr | createTimer (Duration period, Duration tolerance, void(Class::*f)(const Timer &), Class *obj, bool oneshot=false) |
| TimerPtr | createTimer (Duration period, Duration tolerance, void(Class::*f)(const Timer &), bool oneshot=false) |
| TimerPtr | createTimer (Time time, TimerCallback callback) |
| TimerPtr | createTimer (Time time, void(Class::*f)(const Timer &), Class *obj) |
| TimerPtr | createTimer (Time time, void(Class::*f)(const Timer &)) |
| void | removeTimer (TimerPtr timer) |
| void | removeTimer (TimerPtr timer) |
| void | start () override |
| void | start () override |
| void | stop () override |
| void | stop () override |
| bool | spin (const Duration &maxWait=Duration::infinity()) |
| bool | spin (const Duration &maxWait=Duration::infinity()) |
| bool | hasWork (Time horizon=Time::now()) const |
| bool | hasWork (Time horizon=Time::now()) const |
| bool | hasUnrecoverableFailure () const override |
| bool | hasUnrecoverableFailure () const override |
| bool | isStarted () const override |
| bool | isStarted () const override |
| bool | isRunning () const override |
| bool | isRunning () const override |
| std::string | resolveName (const std::string &name) const |
| std::string | resolveName (const std::string &name) const |
| std::string | resolveServiceName (const std::string &name) const |
| std::string | resolveServiceName (const std::string &name) const |
| Channel< T > | publish (const std::string &channelID) |
| Channel< T > | publish (const std::string &channelID, const Typename &type) |
| Channel< T > | publish (const std::string &channelID) |
| Channel< T > | publish (const std::string &channelID, const Typename &type) |
| void | unpublish (const std::string &channelID) |
| void | unpublish (const std::string &channelID) |
| Channel< T > | subscribe (const std::string &channelID, const Duration &storageDuration=Duration::seconds(0)) |
| Channel< T > | subscribe (const std::string &channelID, boost::function< void(ChannelRead< T >)> fn, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | subscribe (const std::string &channelID, boost::function< void(ChannelRead< T >)> fn, bool independentThread) |
| Channel< T > | subscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | subscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, bool independentThread) |
| Channel< T > | subscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | subscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), bool independentThread) |
| Channel< T > | subscribe (const std::string &channelID, const Duration &storageDuration=Duration::seconds(0)) |
| Channel< T > | subscribe (const std::string &channelID, boost::function< void(ChannelRead< T >)> fn, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | subscribe (const std::string &channelID, boost::function< void(ChannelRead< T >)> fn, bool independentThread) |
| Channel< T > | subscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | subscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, bool independentThread) |
| Channel< T > | subscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | subscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), bool independentThread) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, const Duration &storageDuration=Duration::seconds(0)) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, boost::function< void(ChannelRead< T >)> fn, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, boost::function< void(ChannelRead< T >)> fn, bool independentThread) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, bool independentThread) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), bool independentThread) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, const Duration &storageDuration=Duration::seconds(0)) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, boost::function< void(ChannelRead< T >)> fn, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, boost::function< void(ChannelRead< T >)> fn, bool independentThread) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, bool independentThread) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), const Duration &storageDuration=Duration::seconds(0), bool independentThread=false) |
| Channel< T > | publishAndSubscribe (const std::string &channelID, void(Class::*f)(ChannelRead< T >), bool independentThread) |
| Channel< T > | subscribeInterval (const std::string &channelID, boost::function< void(ChannelReadInterval< T >)> fn, const Duration &storageDuration, bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeInterval (const std::string &channelID, void(Class::*f)(ChannelReadInterval< T >), Class *obj, const Duration &storageDuration, bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeInterval (const std::string &channelID, void(Class::*f)(ChannelReadInterval< T >), const Duration &storageDuration, bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeInterval (const std::string &channelID, boost::function< void(ChannelReadInterval< T >)> fn, const Duration &storageDuration, bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeInterval (const std::string &channelID, void(Class::*f)(ChannelReadInterval< T >), Class *obj, const Duration &storageDuration, bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeInterval (const std::string &channelID, void(Class::*f)(ChannelReadInterval< T >), const Duration &storageDuration, bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeIntervalByElements (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeIntervalByElements (const std::string &channelID, boost::function< void(ChannelRead< T >)>, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeIntervalByElements (const std::string &channelID, void(Class::*f)(ChannelRead< T >), const Duration &storageDuration=Duration::seconds(0), bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeIntervalByElements (const std::string &channelID, void(Class::*f)(ChannelRead< T >), Class *obj, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeIntervalByElements (const std::string &channelID, boost::function< void(ChannelRead< T >)>, const Duration &storageDuration=Duration::seconds(0), bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| Channel< T > | subscribeIntervalByElements (const std::string &channelID, void(Class::*f)(ChannelRead< T >), const Duration &storageDuration=Duration::seconds(0), bool independentThread=false, const Time &startAfter=Time::unixEpoch()) |
| ChannelRead< T > | waitForData (Channel< T > channel, Duration timeout=Duration::infinity()) const |
| ChannelRead< T > | waitForData (Channel< T > channel, Duration timeout=Duration::infinity()) const |
| void | unsubscribe (const std::string &channelID) |
| void | unsubscribe (const std::string &channelID) |
| void | unsubscribe (const std::string &channelID) |
| void | unsubscribe (const std::string &channelID) |
| Channel< T > | getChannel (const std::string &channelID) |
| Channel< T > | getChannel (const std::string &channelID) |
| bool | isSubscribedOn (const std::string &channelID) const |
| bool | isSubscribedOn (const std::string &channelID) const |
| MIRA_DEPRECATED ("Please use isSubscribedOn() instead", bool hasSubscribedOn(const std::string &channelID) const) | |
| MIRA_DEPRECATED ("Please use isSubscribedOn() instead", bool hasSubscribedOn(const std::string &channelID) const) | |
| bool | hasPublished (const std::string &channelID) const |
| bool | hasPublished (const std::string &channelID) const |
| bool | doesChannelExist (const std::string &channelID) const |
| bool | doesChannelExist (const std::string &channelID) const |
| bool | waitForChannel (const std::string &channelID, const Duration &timeout=Duration::infinity()) const |
| bool | waitForChannel (const std::string &channelID, const Duration &timeout=Duration::infinity()) const |
| bool | isTransformAvailable (const std::string &targetID, const std::string &sourceID) const |
| bool | isTransformAvailable (const std::string &targetID, const std::string &sourceID, const std::string &fixedID) const |
| bool | isTransformAvailable (const std::string &targetID, const std::string &sourceID) const |
| bool | isTransformAvailable (const std::string &targetID, const std::string &sourceID, const std::string &fixedID) const |
| bool | waitForTransform (const std::string &targetID, const std::string &sourceID, Duration timeout=Duration::invalid()) const |
| bool | waitForTransform (const std::string &targetID, const std::string &sourceID, const std::string &fixedID, Duration timeout=Duration::invalid()) const |
| bool | waitForTransform (const std::string &targetID, const std::string &sourceID, Duration timeout=Duration::invalid()) const |
| bool | waitForTransform (const std::string &targetID, const std::string &sourceID, const std::string &fixedID, Duration timeout=Duration::invalid()) const |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, boost::function< void(Transform, Time)> fn, Filter &&filter) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, void(Class::*f)(Transform, Time), Class *obj, Filter &&filter) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, void(Class::*f)(Transform, Time), Filter &&filter) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, boost::function< void(Transform, Time)> fn) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, void(Class::*f)(Transform, Time), Class *obj) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, void(Class::*f)(Transform, Time)) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, boost::function< void(Transform, Time)> fn, Filter &&filter) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, void(Class::*f)(Transform, Time), Class *obj, Filter &&filter) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, void(Class::*f)(Transform, Time), Filter &&filter) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, boost::function< void(Transform, Time)> fn) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, void(Class::*f)(Transform, Time), Class *obj) |
| void | subscribeTransform (const std::string &targetID, const std::string &sourceID, void(Class::*f)(Transform, Time)) |
| Transform | getTransform (const std::string &targetID, const std::string &sourceID, const Time &time, Filter &&filter) const |
| Transform | getTransform (const std::string &targetID, const std::string &sourceID, const Time &time=Time()) const |
| Transform | getTransform (const std::string &targetID, const Time &targetTime, const std::string &sourceID, const Time &sourceTime, const std::string &fixedID, Filter &&filter) const |
| Transform | getTransform (const std::string &targetID, const Time &targetTime, const std::string &sourceID, const Time &sourceTime, const std::string &fixedID) const |
| Transform | getTransform (const TransformDesc &desc, const Time &time, Filter &&filter) const |
| Transform | getTransform (const TransformDesc &desc, const Time &time=Time()) const |
| Transform | getTransform (const TransformDesc &desc, const Time &targetTime, const Time &sourceTime, Filter &&filter) const |
| Transform | getTransform (const TransformDesc &desc, const Time &targetTime, const Time &sourceTime) const |
| Transform | getTransform (const std::string &targetID, const std::string &sourceID, const Time &time, Filter &&filter) const |
| Transform | getTransform (const std::string &targetID, const std::string &sourceID, const Time &time=Time()) const |
| Transform | getTransform (const std::string &targetID, const Time &targetTime, const std::string &sourceID, const Time &sourceTime, const std::string &fixedID, Filter &&filter) const |
| Transform | getTransform (const std::string &targetID, const Time &targetTime, const std::string &sourceID, const Time &sourceTime, const std::string &fixedID) const |
| Transform | getTransform (const TransformDesc &desc, const Time &time, Filter &&filter) const |
| Transform | getTransform (const TransformDesc &desc, const Time &time=Time()) const |
| Transform | getTransform (const TransformDesc &desc, const Time &targetTime, const Time &sourceTime, Filter &&filter) const |
| Transform | getTransform (const TransformDesc &desc, const Time &targetTime, const Time &sourceTime) const |
| FrameworkTransformerNode * | getTransformNode (const std::string &frameID) const |
| FrameworkTransformerNode * | getTransformNode (const std::string &frameID) const |
| TransformDesc | prepareTransform (const std::string &targetID, const std::string &sourceID) const |
| TransformDesc | prepareTransform (const std::string &targetID, const std::string &sourceID, const std::string &fixedID) const |
| TransformDesc | prepareTransform (const std::string &targetID, const std::string &sourceID) const |
| TransformDesc | prepareTransform (const std::string &targetID, const std::string &sourceID, const std::string &fixedID) const |
| void | publishTransform (const std::string &frameID, const Transform &transform, const Time &time) const |
| void | publishTransform (const std::string &frameID, const Transform &transform, const Time &time) const |
| void | publishTransformIndirect (const std::string &frameID, const std::string &targetID, const std::string &sourceID, const Transform &transform, const Time &time, Filter &&filter=NearestNeighborInterpolator()) const |
| void | publishTransformIndirect (const std::string &frameID, const std::string &targetID, const std::string &sourceID, const Transform &transform, const Time &time, Filter &&filter=NearestNeighborInterpolator()) const |
| void | addTransformLink (const std::string &childID, const std::string &parentID) const |
| void | addTransformLink (const std::string &childID, const std::string &parentID, FrameworkTransformerNode::Type type) const |
| void | addTransformLink (const std::string &childID, const std::string &parentID) const |
| void | addTransformLink (const std::string &childID, const std::string &parentID, FrameworkTransformerNode::Type type) const |
| void | publishService (const std::string &name, Service &iService, RPCHandlerPtr handler=RPCHandlerPtr()) |
| void | publishService (Service &iService, RPCHandlerPtr handler=RPCHandlerPtr()) |
| void | publishService (const std::string &name, Service &iService, RPCHandlerPtr handler=RPCHandlerPtr()) |
| void | publishService (Service &iService, RPCHandlerPtr handler=RPCHandlerPtr()) |
| void | unpublishService () |
| void | unpublishService (const std::string &name) |
| void | unpublishService () |
| void | unpublishService (const std::string &name) |
| RPCFuture< R > | callService (const std::string &iService, const std::string &method, ARGS &&... args) const |
| RPCFuture< R > | callService (const std::string &iService, const std::string &method, ARGS &&... args) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const json::Value &jsonRequest) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const std::string &jsonString) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const std::string &service, const std::string &method, const json::Value ¶ms=json::Value()) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const std::string &service, const std::string &method, const std::string ¶ms) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const RPCCallDefinition &rpc) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const json::Value &jsonRequest) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const std::string &jsonString) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const std::string &service, const std::string &method, const json::Value ¶ms=json::Value()) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const std::string &service, const std::string &method, const std::string ¶ms) const |
| RPCFuture< JSONRPCResponse > | callServiceJSON (const RPCCallDefinition &rpc) const |
| ServiceCall< F > | createServiceCall (const std::string &service, std::string method, bool waitTillExists=true, bool showBootupMsg=true) |
| ServiceCall< F > | createServiceCall (const std::string &service, std::string method, bool waitTillExists=true, bool showBootupMsg=true) |
| bool | existsService (const std::string &name) const |
| bool | existsService (const std::string &name) const |
| bool | implementsInterface (const std::string &name, const std::string &interface) const |
| bool | implementsInterface (const std::string &name, const std::string &interface) const |
| bool | waitForService (const std::string &name, Duration timeout=Duration::invalid()) const |
| bool | waitForService (const std::string &name, Duration timeout=Duration::invalid()) const |
| std::string | waitForServiceInterface (const std::string &interface, Duration timeout=Duration::invalid()) const |
| std::string | waitForServiceInterface (const std::string &interface, Duration timeout=Duration::invalid()) const |
| std::list< std::string > | queryServicesForInterface (const std::string &interface) const |
| std::list< std::string > | queryServicesForInterface (const std::string &interface) const |
| void | registerCallbackForInterface (const std::string &interface, ServiceInterfaceHandler::Callback cb) |
| void | registerCallbackForInterface (const std::string &interface, void(Class::*f)(const std::string &, const std::string &), Class *obj) |
| void | registerCallbackForInterface (const std::string &interface, ServiceInterfaceHandler::Callback cb) |
| void | registerCallbackForInterface (const std::string &interface, void(Class::*f)(const std::string &, const std::string &), Class *obj) |
| boost::shared_ptr< PropertyNode > | getProperties () override |
| boost::shared_ptr< PropertyNode > | getProperties () override |
| std::set< std::string > | getPublishedChannels () override |
| std::set< std::string > | getPublishedChannels () override |
| std::set< std::string > | getSubscribedChannels () override |
| std::set< std::string > | getSubscribedChannels () override |
| std::set< std::string > | getServiceInterfaces () override |
| std::set< std::string > | getServiceInterfaces () override |
| ChannelNameMapping | getPublishedChannelNames () override |
| ChannelNameMapping | getPublishedChannelNames () override |
| ChannelNameMapping | getSubscribedChannelNames () override |
| ChannelNameMapping | getSubscribedChannelNames () override |
| ChannelStatusMap | getSubscribedChannelStatus () override |
| ChannelStatusMap | getSubscribedChannelStatus () override |
| std::string | getNamespace () const |
| std::string | getNamespace () const |
| std::string | getGlobalName () const |
| std::string | getGlobalName () const |
| std::string | getGlobalID () const |
| std::string | getGlobalID () const |
| std::string | getID () const |
| std::string | getID () const |
| std::string | getName () const |
| std::string | getName () const |
| const AuthorityDescription & | getDescription () const |
| const AuthorityDescription & | getDescription () const |
Static Public Member Functions | |
| static PseudoClass const & | CLASS () |
Public Attributes | |
| NORMAL | |
| ANONYMOUS | |
| HIDDEN | |
| INVISIBLE_PUBLISHER_SUBSCRIBER | |
| INTERNAL | |
| INDEPENDENT_SUBSCRIBER_THREAD | |
| INDEPENDENT_RPC_THREAD | |
| NO_MAIN_THREAD | |
Protected Types | |
| typedef std::map< std::string, RWAccessFlags > | RWAccessMap |
| typedef std::list< AbstractChannelSubscriberPtr > | SubscribePtrList |
Protected Member Functions | |
| virtual void | initialize () |
| Called in initialize(parent). More... | |
| virtual Class const & | internalGetClass () const=0 |
| Channel< T > | toProxy (ConcreteChannel< T > *channel) |
| void | setChannelReadAccess (const std::string &channelID) |
| void | setChannelWriteAccess (const std::string &channelID) |
| void | removeChannelReadAccess (const std::string &channelID) |
| void | removeChannelWriteAccess (const std::string &channelID) |
| void | insertChannelNameMapping (AbstractAuthority::ChannelNameMapping &map, const std::string &local, const std::string &global) |
| void | eraseChannelNameMapping (AbstractAuthority::ChannelNameMapping &map, const std::string &local, const std::string &global) |
| void | remotePublishService (const std::string &service) const |
| PropertyTree | getPropertiesRPC () |
| void | setProperty (const std::string &property, const std::string &value) |
| std::string | getProperty (const std::string &property) const |
| void | setPropertyJSON (const std::string &property, const json::Value &value) |
| json::Value | getPropertyJSON (const std::string &property) const |
Protected Attributes | |
| AuthorityDescription | mDescription |
| boost::optional< Status > | mBootUpStatus |
| boost::optional< Status > | mRecoverStatus |
| Duration | mHeartbeatInterval |
| boost::optional< Time > | mLastHeartbeat |
| StatusMap | mStatusMap |
| std::string | mName |
Detailed Description
Interface for metric planners like Dijkstra and E*.
Member Typedef Documentation
◆ Carrot
◆ CostFn
| typedef std::function<float(int x, int y, float r)> CostFn |
Type declaration for a cost function to be used with setGoal(const Polygon2i, ...) or setGoal(const Polygon2f, ...).
CostFn is a function taking parameters int x, int y and float r (a cell's coordinates and distance to goal). The function must return a float value which is the initial cost for cell <x,y>. The distance r is given in cells, and the returned initial costs/distance must be returned in cells (not meter).
Member Enumeration Documentation
◆ Status
| enum Status |
Constructor & Destructor Documentation
◆ AbstractMetricPlanner()
◆ ~AbstractMetricPlanner()
|
inlinevirtual |
Member Function Documentation
◆ initialize() [1/2]
| void initialize | ( | Authority * | parent | ) |
◆ initialize() [2/2]
|
inlineprotectedvirtual |
Called in initialize(parent).
Default implementation is empty, can be overwritten in subclasses.
◆ getGradient()
Returns the gradient for a position in world coordinates.
Implemented in MetricPlannerBase.
◆ update() [1/2]
| void update | ( | const maps::CostMap & | map | ) |
Update the planning context with the current costmap (entire area).
Calls update(map, {mapArea}) for the actual work.
◆ update() [2/2]
|
pure virtual |
Update the planning context with the current costmap (dirty regions only)
Implemented in MetricPlannerBase.
◆ setOnewayMap()
|
pure virtual |
Set a map describing oneway road restrictions.
Implemented in MetricPlannerBase.
◆ infinity()
|
pure virtual |
Returns the value that is returned by getValue() when cost values are not yet computed or are infinite.
Implemented in MetricPlannerBase, and EstarPlanner.
◆ getValue()
|
pure virtual |
Returns the cost value at position (in world coordinates) in the planner map.
By default the value is taken from the double buffer (if enabled), to ensure the returned value is valid, even while planning is in progress. This can be suppressed by ignoreDoubleBuffer=true.
Implemented in MetricPlannerBase.
◆ getValueFiltered()
|
pure virtual |
Returns the interpolated cost value at position (in world coordinates) in the planner map.
Interpolation is taking into account the 4 cells closest to position, weighted with their distance.
Implemented in MetricPlannerBase.
◆ getCarrot()
|
pure virtual |
Return the optimal path to the goal, starting at pos.
The path consists of (x,y) positions. Path length can be limited by maxCount (number of path entries) or maxDistance (distance between pos and path entry). If neither limit is reached before, the path will end at the goal position.
Implemented in MetricPlannerBase.
◆ getCurrentGoal()
Return the current goal point.
If a point goal is set, return it. If a polygon goal is set (see setGoal), follow the path starting at pos to find out where it ends.
Implemented in MetricPlannerBase.
◆ world2map()
Convert a given point to integer map coordinates.
- Parameters
-
[in] p Point in world coordinates
- Returns
- Point in map coordinates
- Note
- The point is not required to be checked against exceeding the map boundaries.
Implemented in MetricPlannerBase.
◆ map2world()
Convert a given point to world coordinates.
- Parameters
-
[in] p Point in map coordinates
- Returns
- Point in world coordinates
Implemented in MetricPlannerBase.
◆ getCellSize()
|
pure virtual |
Get planner map cell size.
Implemented in MetricPlannerBase.
◆ getRegion()
|
pure virtual |
Get planner map area (world coordinates)
Implemented in MetricPlannerBase.
◆ getMapRegion()
|
pure virtual |
Get planner map area (map coordinates)
Implemented in MetricPlannerBase.
◆ getAccumulatedPlanningTime()
|
pure virtual |
Get accumulated planning time since goal was set.
Implemented in MetricPlannerBase.
◆ setRobotPosition()
|
inlinevirtual |
Set the current robot position in planner (world position) Base implementation is empty.
◆ setGoal() [1/5]
|
pure virtual |
- Parameters
-
goal radius clearDoubleBuffer If the goal moves steadily, it makes sense not to clear the double buffer and thereby follow the old goal until the path to the new goal position is planned prepareNew do preparation for new goal, should be false when just trying to set the same goal again, e.g. because the goal region was entirely inaccessible
Implemented in MetricPlannerBase.
◆ setGoal() [2/5]
|
pure virtual |
Sets the interior of the polygon as goal region and additionally adds an optional goal border with the specified radius where the initial costs are set for seeding the wavefront propagation.
The coordinates of the polygon are given in map coordinates here.
Implemented in MetricPlannerBase.
◆ setGoal() [3/5]
|
pure virtual |
Same as above but takes world coordinates in meter.
Implemented in MetricPlannerBase.
◆ setGoal() [4/5]
|
pure virtual |
Same as above but additionally allows to specify a cost function that is called for each cell within the polygon to compute the initial costs of that cell.
Implemented in MetricPlannerBase.
◆ setGoal() [5/5]
|
pure virtual |
Same as above but takes world coordinates in meter.
Implemented in MetricPlannerBase.
◆ hasValidGoal()
|
pure virtual |
Check if the internal planner has a goal.
This can be false even after calling setGoal() e.g. if the entire goal region was occupied by obstacles (which might warrant trying to set the goal again after updating the map).
Implemented in EstarPlanner.
◆ plan()
High level planning interface.
Plans for the specified planning time (or less, if no more work to do). The specified position corresponds to the robots position in map world coordinates. The planning stops when there is no more work to do. Internally the variables for havePlan(), havePlanSinceUpdate() and lastValidPlan() are updated for the given robot position to indicate if a valid path to the goal is available. Internally, this high level planning interface holds several states to detect if the goal cannot be reached:
- Exceptions
-
XPathLost if the planning time is longer than the specified PathLostTimout (and if we had a path before). However, this exception is more like a warning. The planning continues and you can continue to call plan(), until the XNoPath exception occurs. XNoPlan if the planning time is longer than MaxPlanningTime. This indicates that there is no path to the goal.
Implemented in MetricPlannerBase.
◆ havePlan()
|
pure virtual |
Returns if we have or have had a valid path to the set goal.
Part of the high level planning interface.
Implemented in MetricPlannerBase.
◆ havePlanSinceUpdate()
|
pure virtual |
Returns if we have or have had a valid path to the set goal, after the cost map was updated.
Part of the high level planning interface.
Implemented in MetricPlannerBase.
◆ lastValidPlan()
|
pure virtual |
Return last time a valid plan existed.
Implemented in MetricPlannerBase.
◆ haveWork()
|
pure virtual |
Low level planning interface.
Returns true, if more planning can be done.
Implemented in EstarPlanner.
◆ planTime()
|
pure virtual |
Low level planning interface.
Plans for the specified planning time (or less, if no more work to do).
Implemented in MetricPlannerBase.
◆ planSteps()
|
pure virtual |
Low level planning interface.
Performs the specified number of iterations in wavefront propagation (or less, if no more work to do).
Implemented in MetricPlannerBase.
◆ planStep()
|
pure virtual |
Low level planning interface.
Performs a single iteration in wavefront propagation.
Implemented in EstarPlanner.
◆ resetPlanningTimeout()
|
pure virtual |
Reset initial last plan time that is used for timeout.
Implemented in MetricPlannerBase.
◆ getNavFunction()
|
pure virtual |
Creates a deep copy of the navigation function that contains the accumulated costs from each cell to the goal as a potential field.
By default the value is taken from the double buffer (if enabled). This can be suppressed by ignoreDoubleBuffer=true.
Implemented in MetricPlannerBase.
◆ dumpNavStatus()
|
pure virtual |
Create a color image of the navigation function (for user presentation, debugging).
Implemented in MetricPlannerBase.
◆ showNavFunctionNearGoal()
|
pure virtual |
Create high-res image of navigation function in goal area (for user presentation, debugging).
Implemented in MetricPlannerBase.
◆ getStatus()
Return planner status at world position.
Implemented in MetricPlannerBase.
The documentation for this class was generated from the following file:
- plugins/AbstractMetricPlanner/include/pilot/AbstractMetricPlanner.h
