Sample based trajectory. More...
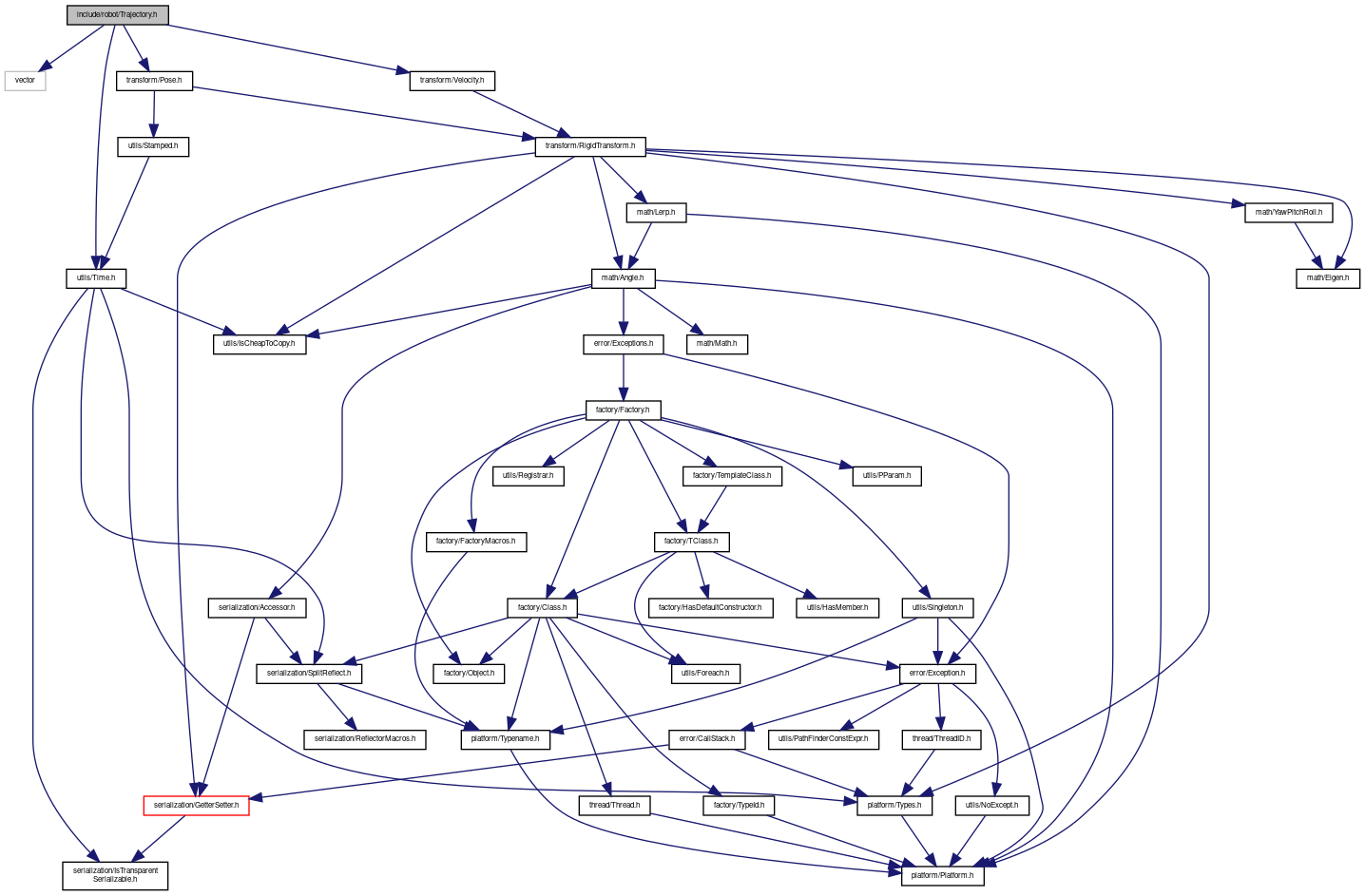
#include <vector>#include <transform/Pose.h>#include <transform/Velocity.h>#include <utils/Time.h>
Include dependency graph for Trajectory.h:
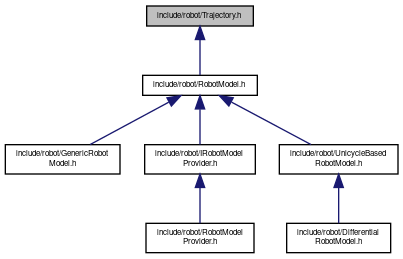
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | PoseTrajectorySample< D > |
| A single sample of a sampled trajectory, containing a pose and the time. More... | |
| class | PoseVelocityTrajectorySample |
| A single sample of a sampled trajectory, containing a pose, velocity and a delta time. More... | |
| class | PoseTrajectory< D > |
| A sampled trajectory, a collection of trajectory samples, each containing a pose at a certain time. More... | |
Namespaces | |
| mira | |
| mira::robot | |
Typedefs | |
| typedef std::vector< PoseVelocityTrajectorySample, Eigen::aligned_allocator< PoseVelocityTrajectorySample > > | PoseVelocityTrajectory |
| A sampled trajectory, a collection of trajectory samples, each containing a pose and velocity at a delta time. More... | |
| typedef PoseTrajectory< 2 > | PoseTrajectory2 |
| typedef PoseTrajectory< 3 > | PoseTrajectory3 |
Detailed Description
Sample based trajectory.
- Date
- 14/07/16
