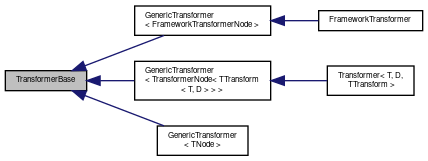
Base class for Transformer to decouple base functionality that is type independent from type dependent Transformer class template. More...
#include <transform/Transformer.h>
Classes | |
| class | Chain |
| Represents a chain or path through the transformation tree from a staring node to the target node containing nodes whose transforms need to be applied inverse and nodes whose transforms need to be applied forward. More... | |
Public Types | |
| typedef AbstractTransformerNode::AbstractNodePtr | AbstractNodePtr |
| Injects the AbstractTransformerNode::AbstractNodePtr type. More... | |
Public Member Functions | |
| TransformerBase () | |
| The default construtor. More... | |
| ~TransformerBase () | |
| The destructor. More... | |
| bool | addLink (AbstractNodePtr child, AbstractNodePtr parent) |
| Adds a link between the specified child and its parent. More... | |
| void | removeLink (AbstractNodePtr child, AbstractNodePtr parent) |
| Removes an existing link between the specified child node and the given parent node. More... | |
| std::list< AbstractNodePtr > | getNodes () |
| Returns all nodes that are known by this transformer. More... | |
| std::list< std::pair< AbstractNodePtr, AbstractNodePtr > > | getLinks () |
| Returns all links (as parent,child-pairs) that are known by this transformer. More... | |
| const std::list< AbstractNodePtr > | getRootNodes () |
| Returns a list of all nodes, that have no ancestor, e.g. More... | |
| void | getTransformChain (AbstractNodePtr target, AbstractNodePtr source, Chain &oChain) |
| bool | isTransformAvailable (AbstractNodePtr target, AbstractNodePtr source) |
| Checks if a transformation between 'target' and 'source' node is available: More... | |
Static Public Attributes | |
| static const int | MAX_TREE_DEPTH = 1000 |
| The max. More... | |
Protected Types | |
| typedef std::map< std::string, AbstractNodePtr > | IDToNodeMap |
Protected Member Functions | |
| void | addNode (AbstractNodePtr node) |
| An exception that is thrown when errors related to transformations occur. More... | |
| AbstractNodePtr | getNode (const std::string &nodeID) |
| Returns the node with the specified id, or nullptr if such a node does not exist. More... | |
Protected Attributes | |
| IDToNodeMap | mNodes |
| maps from ids to nodes that were added to us More... | |
| boost::mutex | mMutex |
| protects the above node map More... | |
Detailed Description
Base class for Transformer to decouple base functionality that is type independent from type dependent Transformer class template.
Member Typedef Documentation
◆ AbstractNodePtr
Injects the AbstractTransformerNode::AbstractNodePtr type.
◆ IDToNodeMap
|
protected |
Constructor & Destructor Documentation
◆ TransformerBase()
| TransformerBase | ( | ) |
The default construtor.
◆ ~TransformerBase()
| ~TransformerBase | ( | ) |
The destructor.
Member Function Documentation
◆ addLink()
| bool addLink | ( | AbstractNodePtr | child, |
| AbstractNodePtr | parent | ||
| ) |
Adds a link between the specified child and its parent.
Both nodes must have been added to this Transformer. If both nodes are connected to each other already this method has no effect. If the child was connected to another parent before it is unlinked from its current parent first and then linked to the new one. Returns true, if the link was new. If the link was already known, false is returned.
◆ removeLink()
| void removeLink | ( | AbstractNodePtr | child, |
| AbstractNodePtr | parent | ||
| ) |
Removes an existing link between the specified child node and the given parent node.
If both nodes are not connected, this method does nothing.
◆ getNodes()
| std::list<AbstractNodePtr> getNodes | ( | ) |
Returns all nodes that are known by this transformer.
◆ getLinks()
| std::list<std::pair<AbstractNodePtr, AbstractNodePtr> > getLinks | ( | ) |
Returns all links (as parent,child-pairs) that are known by this transformer.
◆ getRootNodes()
| const std::list<AbstractNodePtr> getRootNodes | ( | ) |
Returns a list of all nodes, that have no ancestor, e.g.
that are root nodes of a transform tree.
◆ getTransformChain()
| void getTransformChain | ( | AbstractNodePtr | target, |
| AbstractNodePtr | source, | ||
| Chain & | oChain | ||
| ) |
- Exceptions
-
Throws XTransform, if source and target are not connected or if there is a loop in the transform tree.
◆ isTransformAvailable()
| bool isTransformAvailable | ( | AbstractNodePtr | target, |
| AbstractNodePtr | source | ||
| ) |
Checks if a transformation between 'target' and 'source' node is available:
- Is a path between 'target' and 'source' available
- Does every Node along the path contain data
◆ addNode()
|
protected |
An exception that is thrown when errors related to transformations occur.
Adds the specified node to the internal node map
◆ getNode()
|
protected |
Returns the node with the specified id, or nullptr if such a node does not exist.
Member Data Documentation
◆ MAX_TREE_DEPTH
|
static |
The max.
allowed number of levels within a transformation tree. It is used by collectNodesUpwardsToRoot() that is applied to find the "lowest common ancestor" in getTransformChain() to detect loops within the transformation tree.
◆ mNodes
|
protected |
maps from ids to nodes that were added to us
◆ mMutex
|
protected |
protects the above node map
The documentation for this class was generated from the following file:
- base/include/transform/Transformer.h
